|
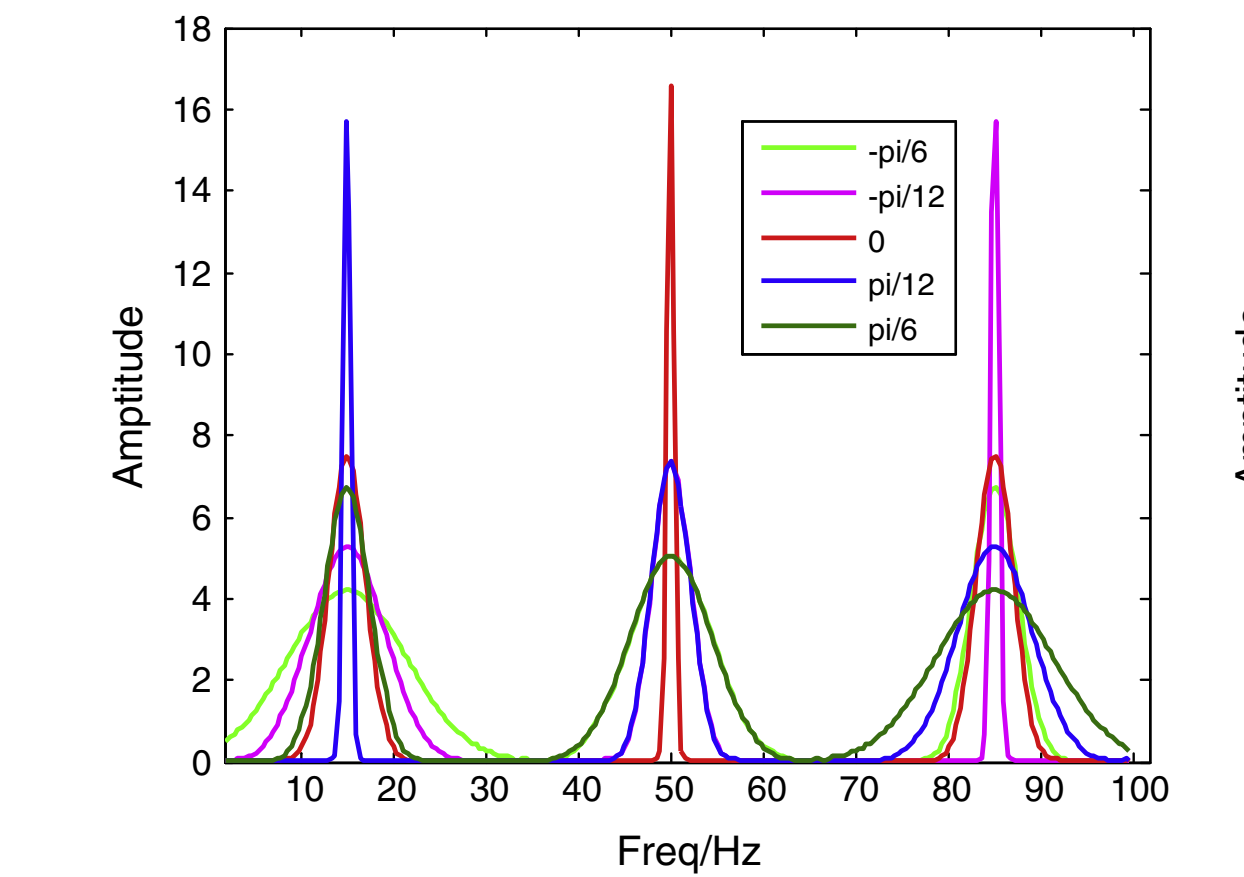
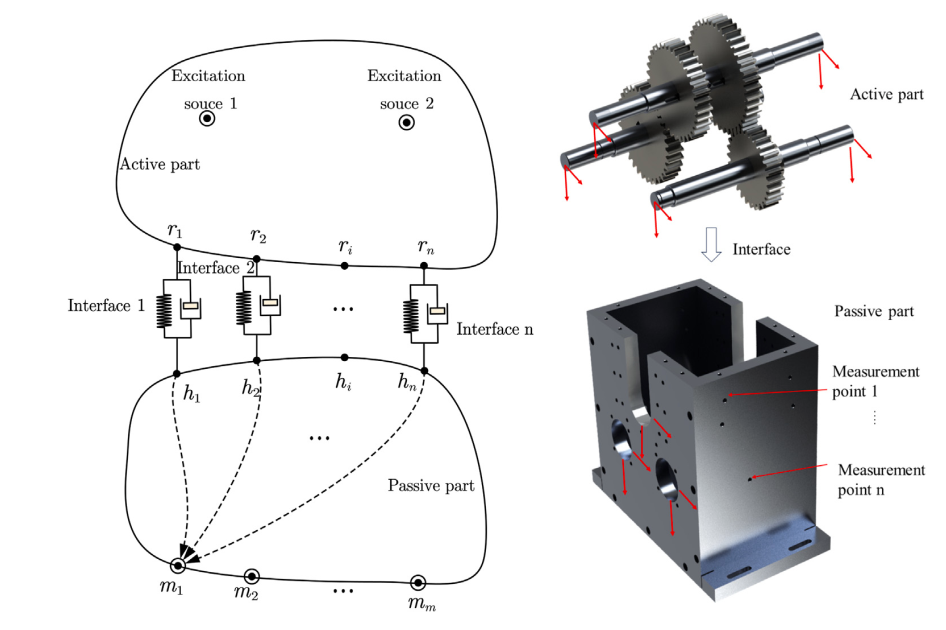
VNCCD: A gearbox fault diagnosis technique under nonstationary conditions via virtual decoupled transfer path
Cai Li, Penghong Lu, Gang Chen*
Mechanical Systems and Signal Processing,221,2024
PDF
Abstract
BibTeX
The interconnection between different components among a gearbox poses a challenge in decoupling vibration signals for fault diagnosis. This study presents a method called Virtual Non-Linear Chirp Component Decoupling (VNCCD) to address gearbox fault diagnosis. The method starts by identifying the decoupled frequency response function (DFRF) using a virtual decoupling method. The bearing force signals are then computed based on the DFRF, and the intrinsic signal components are extracted using a nonlinear chirp mode decomposition technique. The proposed approach enhances the quality of vibration signals in gear systems by eliminating the intercoupling effect of structural transfer paths. By employing the VNCCD method, the amplification of fault conditions can be effectively demonstrated compared to the nonlinear chirp component obtained from the original signal. Simulation and experimental …
@article{chen2024enhancing,
title={Enhancing Reliability through Interpretability: A Comprehensive Survey of Interpretable Intelligent Fault Diagnosis in Rotating Machinery},
author={Chen, Gang and Yuan, Junlin and Zhang, Yiyue and Zhu, Hanyue and Huang, Ruyi and Wang, Fengtao and Li, Weihua},
journal={IEEE Access},
year={2024},
publisher={IEEE}
}
|
|
Fast Pareto set approximation for multi-objective flexible job shop scheduling via parallel preference-conditioned graph reinforcement learning
Chupeng Su, Cong Zhang, Chuang Wang, Weihong Cen, Gang Chen*, Longhan Xie*
Swarm and Evolutionary Computation,88,2024
PDF
Abstract
BibTeX
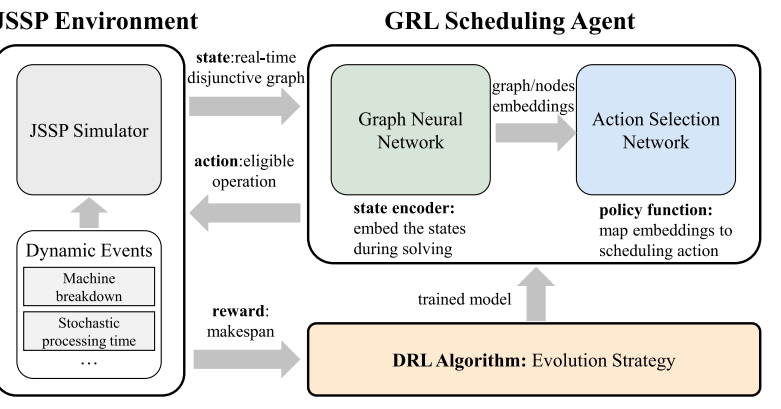
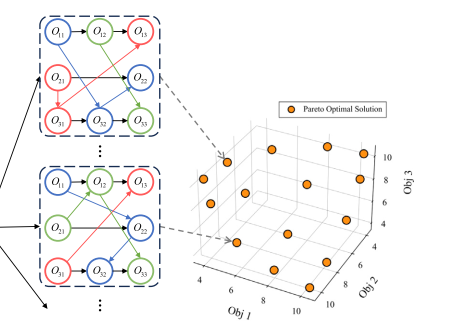
The Multi-Objective Flexible Job Shop Scheduling Problem (MOFJSP) is a complex challenge in manufacturing, requiring balancing multiple, often conflicting objectives. Traditional methods, such as Multi-Objective Evolutionary Algorithms (MOEA), can be time-consuming and unsuitable for real-time applications. This paper introduces a novel Graph Reinforcement Learning (GRL) approach, named Preference-Conditioned GRL, which efficiently approximates the Pareto set for MOFJSP in a parallelized manner. By decomposing the MOFJSP into distinct sub-problems based on preferences and leveraging a parallel multi-objective training algorithm, our method efficiently produces high-quality Pareto sets, significantly outperforming MOEA methods in both solution quality and speed, especially for large-scale problems. Extensive experiments demonstrate the superiority of our approach, with remarkable results on …
@article{chen2024enhancing,
title={Enhancing Reliability through Interpretability: A Comprehensive Survey of Interpretable Intelligent Fault Diagnosis in Rotating Machinery},
author={Chen, Gang and Yuan, Junlin and Zhang, Yiyue and Zhu, Hanyue and Huang, Ruyi and Wang, Fengtao and Li, Weihua},
journal={IEEE Access},
year={2024},
publisher={IEEE}
}
|
|
Enhancing Reliability Through Interpretability: A Comprehensive Survey of Interpretable Intelligent Fault Diagnosis in Rotating Machinery
Gang Chen; Junlin Yuan; Yiyue Zhang; Hanyue Zhu; Ruyi Huang; Fengtao Wang
IEEE ACCESS,2024
PDF
Abstract
BibTeX
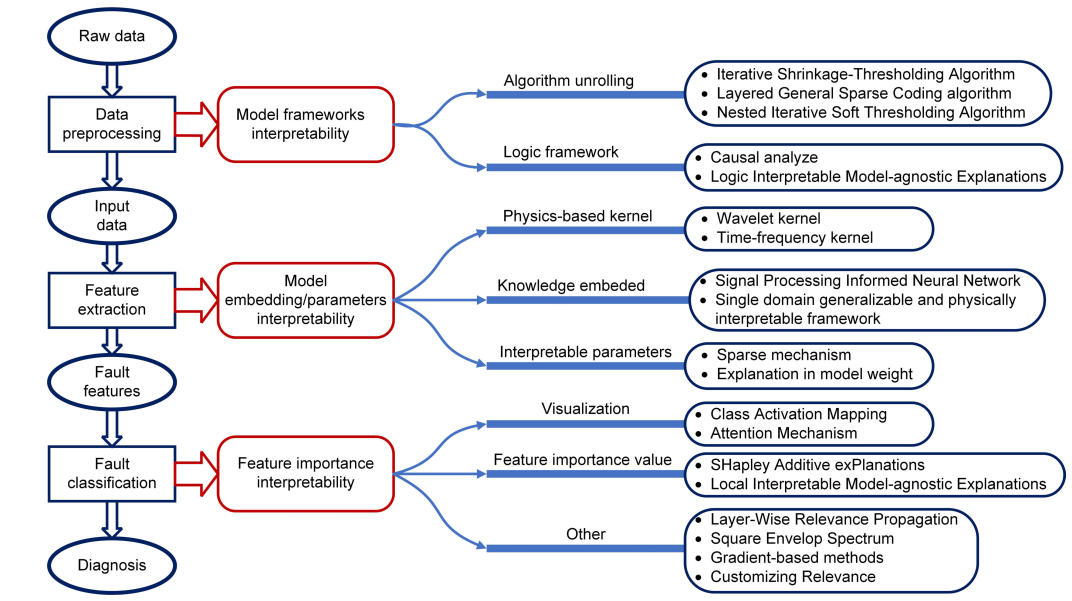
This paper presents a comprehensive survey on interpretable intelligent fault diagnosis for rotating machinery, addressing the challenge of the “black box” nature of machine learning techniques that hampers reliability in automated diagnostic processes. It underscores the growing importance of interpretability in intelligent fault diagnosis (IFD), marking a shift from traditional signal processing methods to machine learning-based approaches that necessitate transparency for trustworthiness. Our review systematically collates and examines the spectrum of interpretability in IFD, distinguishing between post-hoc and ante-hoc strategies. We detail mainstream post-hoc methods, their applications, and critique their limitations, particularly the absence of physical significance. The survey then explores ante-hoc methods that incorporate physical knowledge upfront, enhancing interpretability. By categorizing and evaluating three distinct knowledge embedding approaches, we shed light on their unique applications. Conclusively, we highlight emerging research directions and challenges in the field, aiming to equip readers with a nuanced understanding of current methodologies and inspire future studies in making IFD more reliable and interpretable.
@article{chen2024enhancing,
title={Enhancing Reliability through Interpretability: A Comprehensive Survey of Interpretable Intelligent Fault Diagnosis in Rotating Machinery},
author={Chen, Gang and Yuan, Junlin and Zhang, Yiyue and Zhu, Hanyue and Huang, Ruyi and Wang, Fengtao and Li, Weihua},
journal={IEEE Access},
year={2024},
publisher={IEEE}
}
|
|
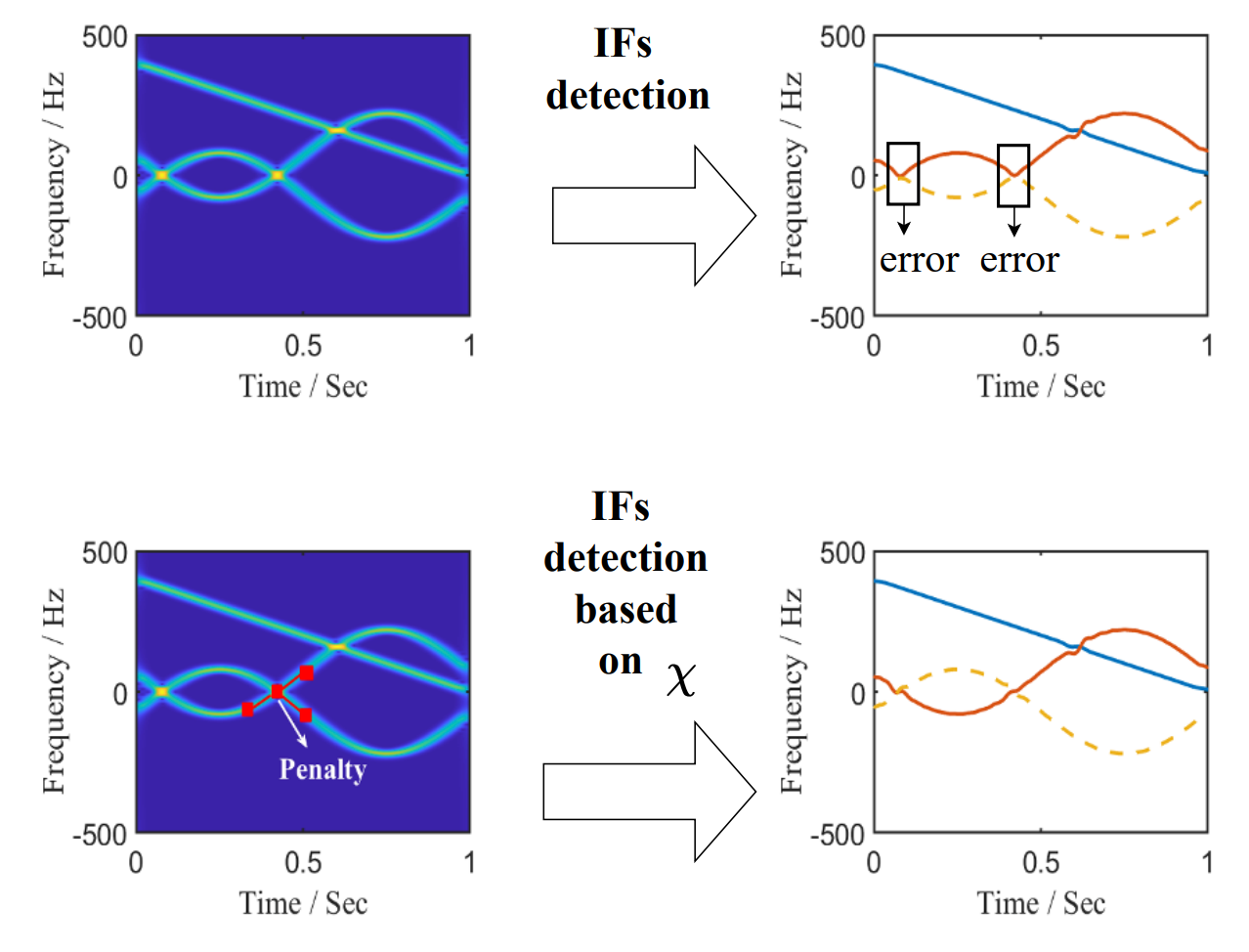
Bearing Fault Diagnosis via Robust PCA with Nonconvex Rank Approximation
Cai Li; Penghong Lu; Guangming Dong, and Gang Chen*
IEEE Sensors Journal,2024
PDF
Abstract
BibTeX
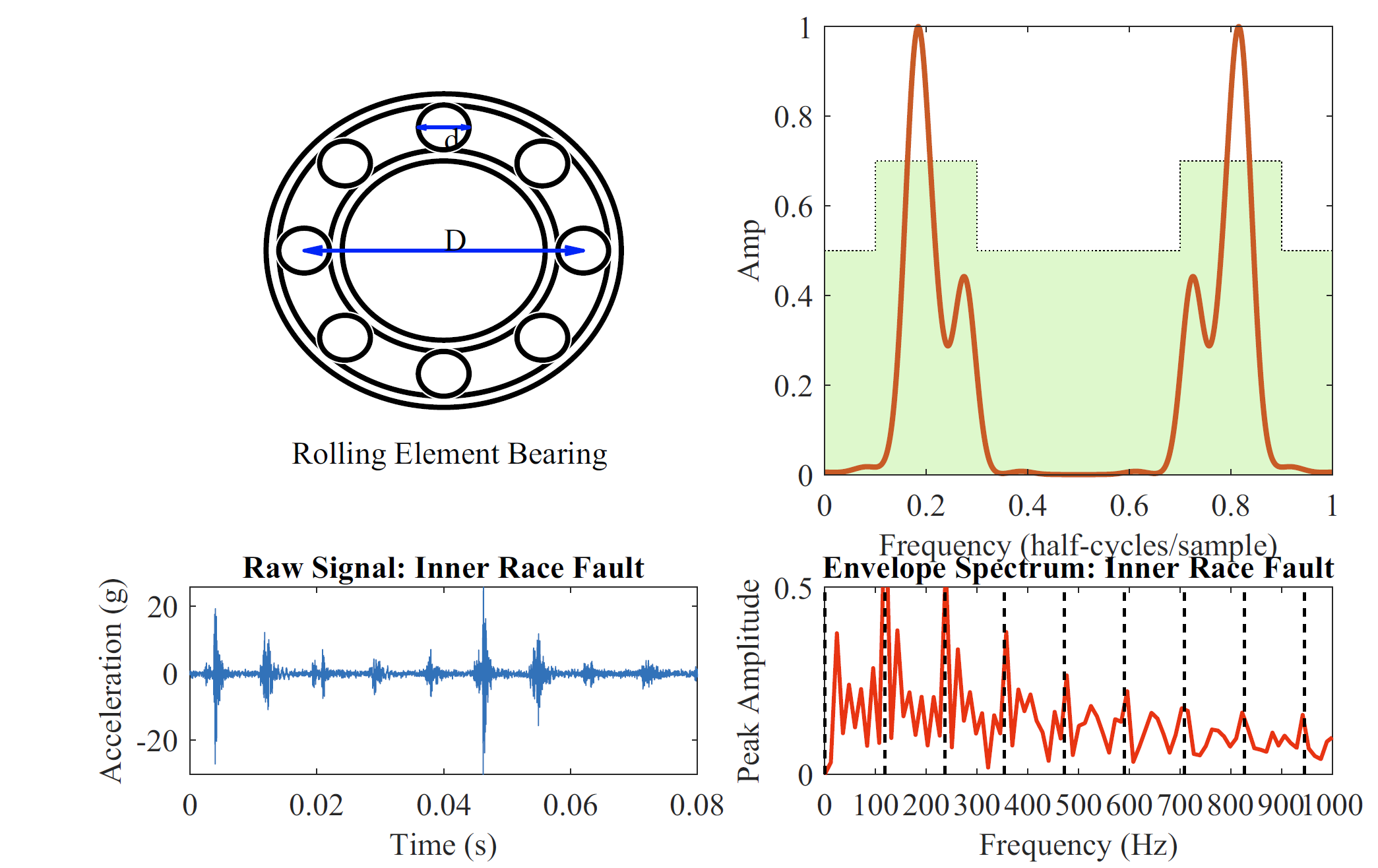
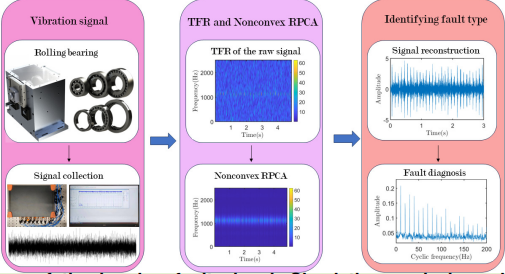
Feature extraction is an essential part of bearing fault diagnosis. Robust principal component analysis (RPCA) provides a general technique for extracting fault features. However, Although the convex relaxed RPCA is convex and easy to optimize, the global optimal solution obtained may deviate significantly from reality. To address this issue, we propose a nonconvex RPCA method for bearing fault diagnosis, utilizing the γ norm penalty. Leveraging the unitary invariance property of the γ norm and the Moreau-Yosida operator, we transform the original equation into a singular value optimization problem using a difference of convex programming to obtain a feasible solution. The most important advantage of Nonconvex RPCA over conventional filtering methods is that it can improve fault feature extraction while decreasing noise interference, which results in substantially enhanced estimation accuracy of the bearing fault signal. Simulation analysis and experimental results confirm the effectiveness of the developed approach. Comparison experiments demonstrate that nonconvex RPCA provides more accurate extraction results compared to L1-norm regularization, Variational Mode Decomposition, and Feature Mode Decomposition.
@article{li2024bearing,
title={Bearing Fault Diagnosis via Robust PCA with Nonconvex Rank Approximation},
author={Li, Cai and Lu, Penghong and Dong, Guangming and Chen, Gang},
journal={IEEE Sensors Journal},
year={2024},
publisher={IEEE}
}
|
|
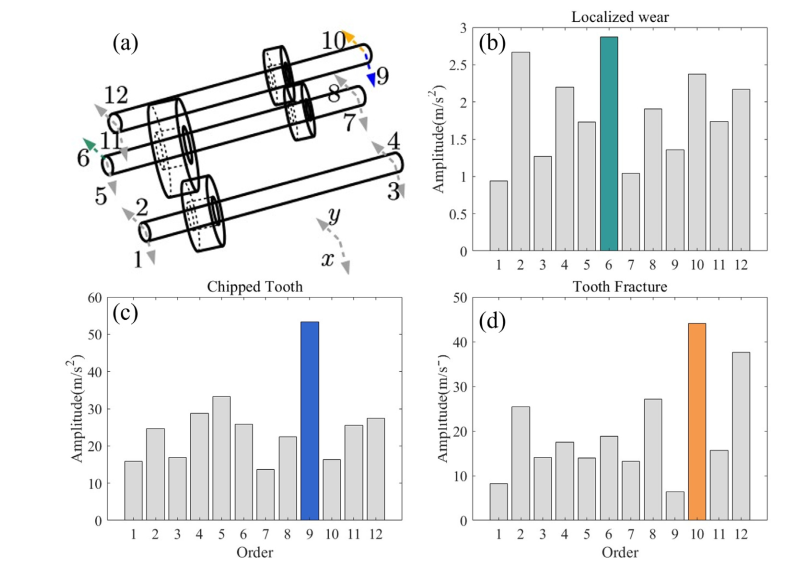
Knowledge-based Clustering Federated Learning for fault diagnosis in robotic assembly
Peng Xiao, Chuang Wang, Ze Lin, Ying Hao, Gang Chen* and Longhan Xie*
Knowledge-Based Systems,2024
PDF
Abstract
BibTeX
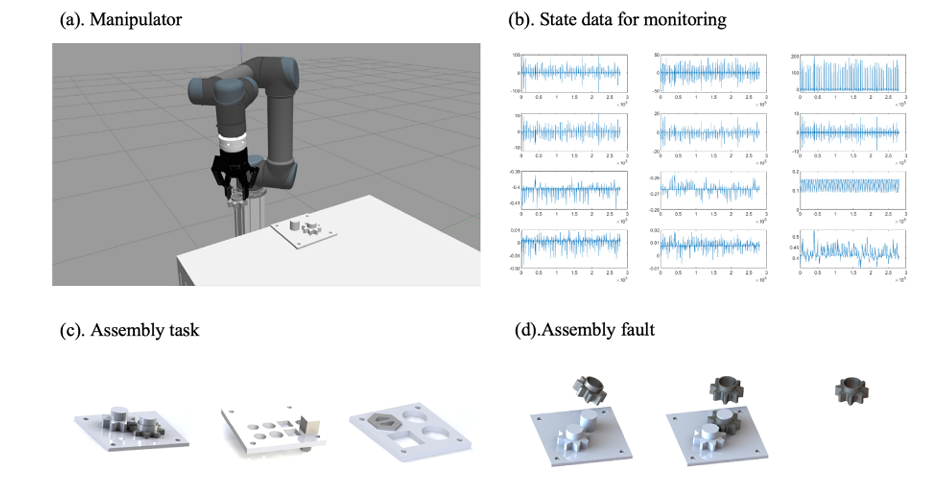
Fault diagnosis in industrial robots is a critical aspect of intelligent manufacturing. However, the accuracy of fault diagnosis models can be significantly affected by the few-shot problem, which refers to the limited availability of labeled data for training. Traditional methods often rely on combining data from different sources, which can raise privacy concerns due to the sensitive nature of the data involved. Federated Learning has emerged as a privacy-preserving approach, but it faces challenges in dealing with the Non-IID (Non-Independent and Identically Distributed) data distribution across different robot systems. In this study, we propose a novel approach called Knowledge-Based Clustering Federated Learning (KCFed) to address both the few-shot problem in robot fault diagnosis and the Non-IID problem in Federated Learning. KCFed incorporates Federated Learning principles to ensure privacy protection during the model training process. Additionally, by leveraging the Knowledge-based Clustering Mechanism (KCM) and Knowledge Accumulation Mechanism (KAM), KCFed aims to improve the performance of fault diagnosis models by clustering similar tasks and accumulating useful prior information. To evaluate the effectiveness of KCFed, we conducted experiments using data collected from industrial robots performing 12 different tasks, resulting in a diverse set of 48 states. The experimental results demonstrate the promising performance of KCFed in improving fault diagnosis accuracy while preserving privacy in a federated learning setting.
@article{xiao2024knowledge,
title={Knowledge-based Clustering Federated Learning for fault diagnosis in robotic assembly},
author={Xiao, Peng and Wang, Chuang and Lin, Ze and Hao, Ying and Chen, Gang and Xie, Longhan},
journal={Knowledge-Based Systems},
volume={294},
pages={111792},
year={2024},
publisher={Elsevier}
}
|
|
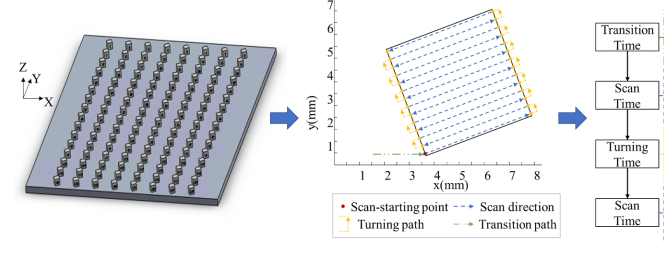
Extended Residual Learning with One-shot Imitation Learning for Robotic Assembly in Semi-structured Environment
Chuang Wang , Chupeng Su , Bozheng Sun , Gang Chen* and Longhan Xie*
Frontiers in Neurorobotics,2024
PDF
Abstract
BibTeX
Robotic assembly tasks require precise manipulation and coordination, often necessitating advanced learning techniques to achieve efficient and effective performance. While residual reinforcement learning with a base policy has shown promise in this domain, existing base policy approaches often rely on hand-designed full-state features and policies or extensive demonstrations, limiting their applicability in semi-structured environments. In this study, we propose an innovative Object-Embodiment-Centric Imitation and Residual Reinforcement Learning (OEC-IRRL) approach that leverages an object-embodiment-centric (OEC) task representation to integrate vision models with imitation and residual learning. By utilizing a single demonstration and minimizing interactions with the environment, our method aims to enhance learning efficiency and effectiveness. The proposed method involves three key steps: creating an object-embodiment-centric task representation, employing imitation learning for a base policy using via-point movement primitives for generalization to different settings, and utilizing residual RL for uncertainty-aware policy refinement during the assembly phase. Through a series of comprehensive experiments, we investigate the impact of the OEC task representation on base and residual policy learning and demonstrate the effectiveness of the method in semi-structured environments. Our results indicate that the approach, requiring only a single demonstration and less than 1.2 hours of interaction, improves success rates by 46% and reduces assembly time by 25%. This research presents a promising avenue for robotic assembly tasks, providing a viable solution without the need for specialized expertise or custom fixtures.
@article{wang2024task,
title={Task attention-based multimodal fusion and curriculum residual learning for context generalization in robotic assembly},
author={Wang, Chuang and Lin, Ze and Liu, Biao and Su, Chupeng and Chen, Gang and Xie, Longhan},
journal={Applied Intelligence},
pages={1--23},
year={2024},
publisher={Springer}
}
|
|
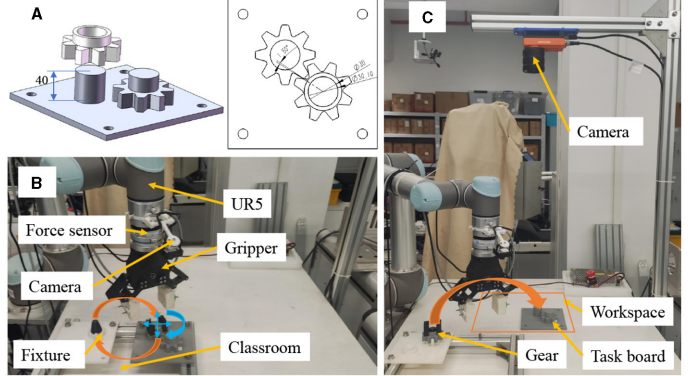
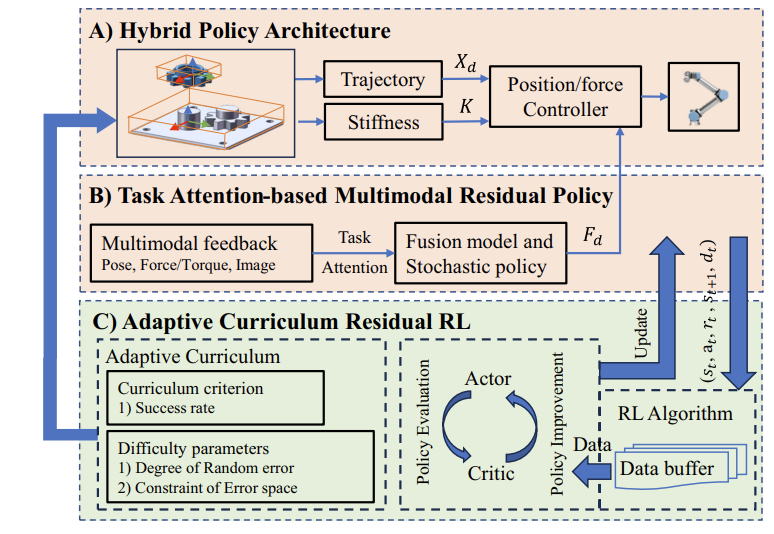
Task attention-based multimodal fusion and curriculum residual learning for context generalization in robotic assembly
Chuang Wang, Ze Lin, Biao Liu, Chupeng Su, Gang Chen*, Longhan Xie*
Applied Intelligence,2024
PDF
Abstract
BibTeX
In the domain of flexible manufacturing, Deep Reinforcement Learning (DRL) has emerged as a pivotal technology for robotic assembly tasks. Despite advancements in sample efficiency and interaction safety through residual reinforcement learning with initial policies, challenges persist in achieving context generalization amidst stochastic systems characterized by large random errors and variable backgrounds. Addressing these challenges, this study introduces a novel framework that integrates task attention-based multimodal fusion with an adaptive error curriculum within a residual reinforcement learning paradigm. Our approach commences with the formulation of a task attention-based multimodal policy that synergizes task-centric visual, relative pose, and tactile data into a compact, end-to-end model. This model is explicitly designed to enhance context generalization by improving observability, thereby ensuring robustness against stochastic errors and variable backgrounds. The second facet of our framework, curriculum residual learning, introduces an adaptive error curriculum that intelligently modulates the guidance and constraints of a model-based feedback controller. This progression from perfect to significantly imperfect initial policies incrementally enhances policy robustness and learning process stability. Empirical validation demonstrates the capability of our method to efficiently acquire a high-precision policy for assembly tasks with clearances as tight as 0.1 mm and error margins up to 20 mm within a 3.5-hour training window-a feat challenging for existing RL-based methods. The results indicate a substantial reduction in average completion time by 75
and a 34 increase in success rate over the classical two-step approach. An ablation study was conducted to assess the contribution of each component within our framework. Real-world task experiments further corroborate the robustness and generalization of our method, achieving over a 90
success rate in variable contexts..
@article{wang2024task,
title={Task attention-based multimodal fusion and curriculum residual learning for context generalization in robotic assembly},
author={Wang, Chuang and Lin, Ze and Liu, Biao and Su, Chupeng and Chen, Gang and Xie, Longhan},
journal={Applied Intelligence},
pages={1--23},
year={2024},
publisher={Springer}
}
|
|
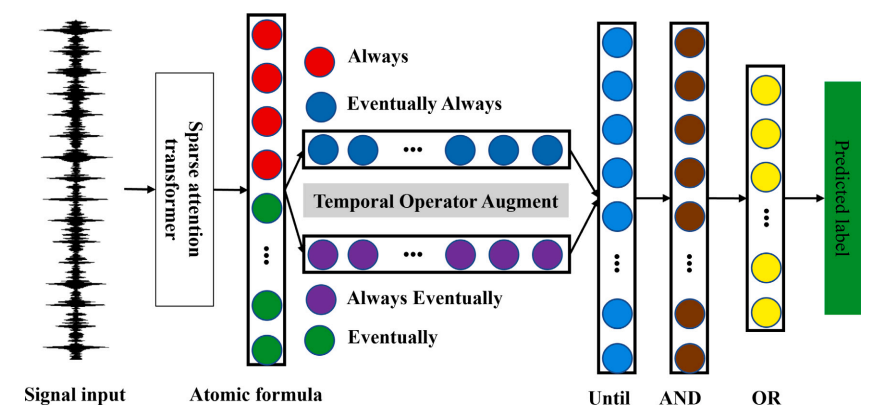
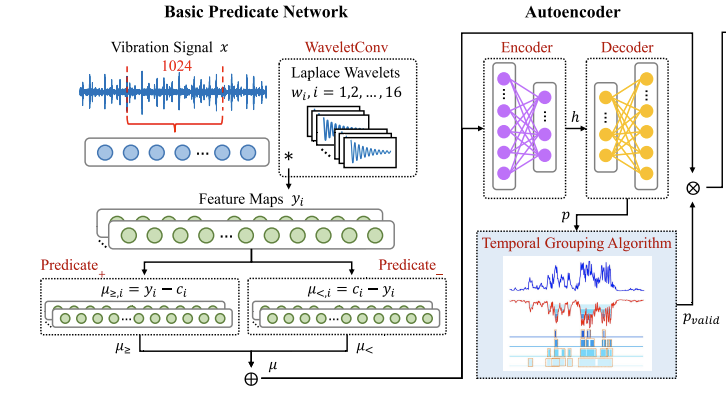
A Neural-symbolic Network for Interpretable Fault Diagnosis of Rolling Element Bearings Based on Temporal Logic
Ruoyao Tian, Mengqian Cui, Gang Chen*
IEEE Transactions on Instrumentation and Measurement,2024
PDF
Abstract
BibTeX
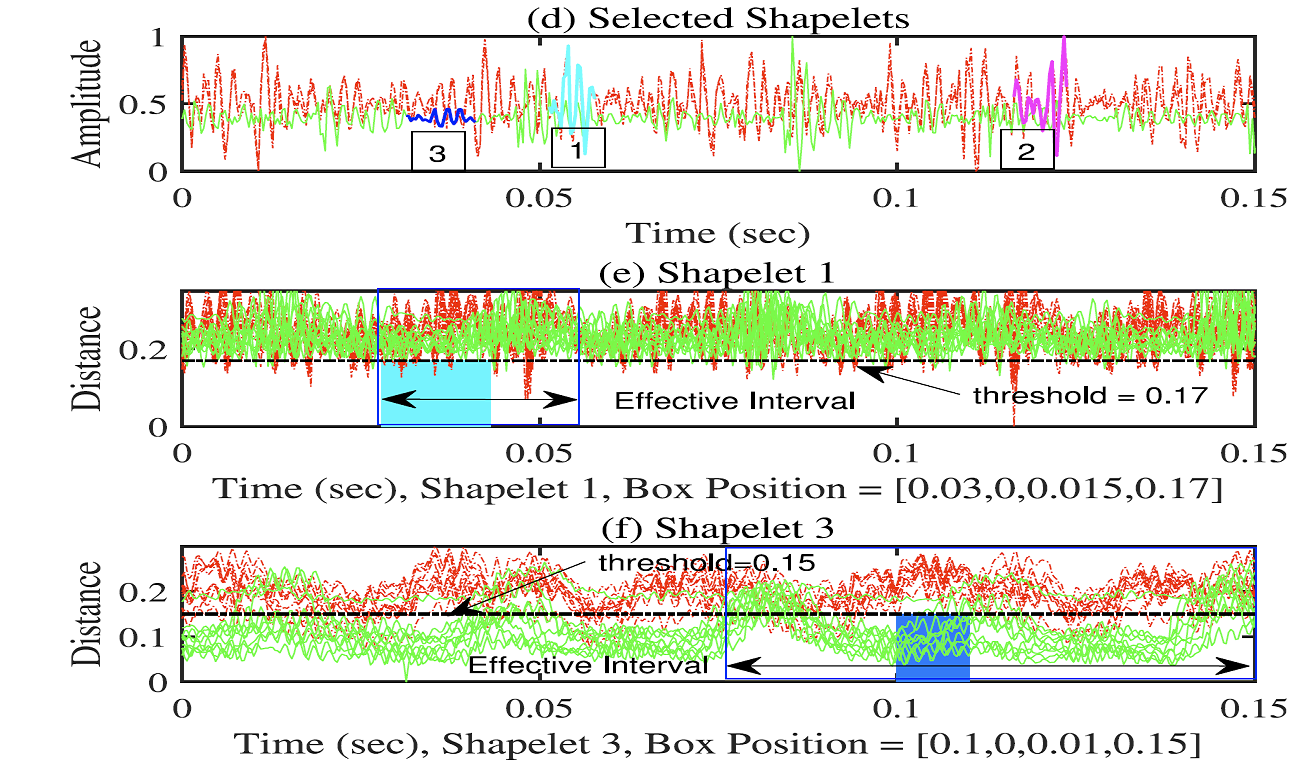
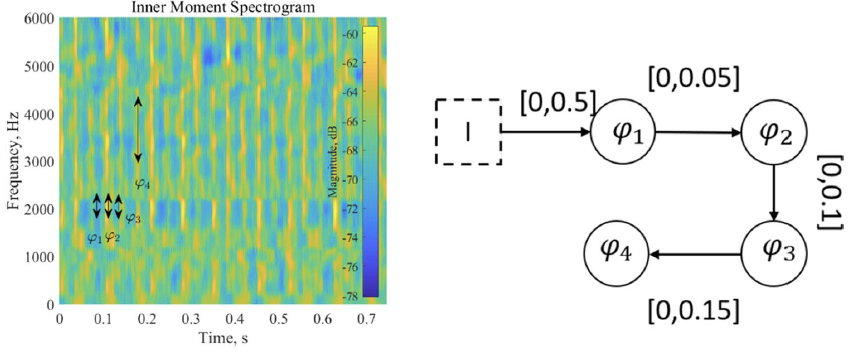
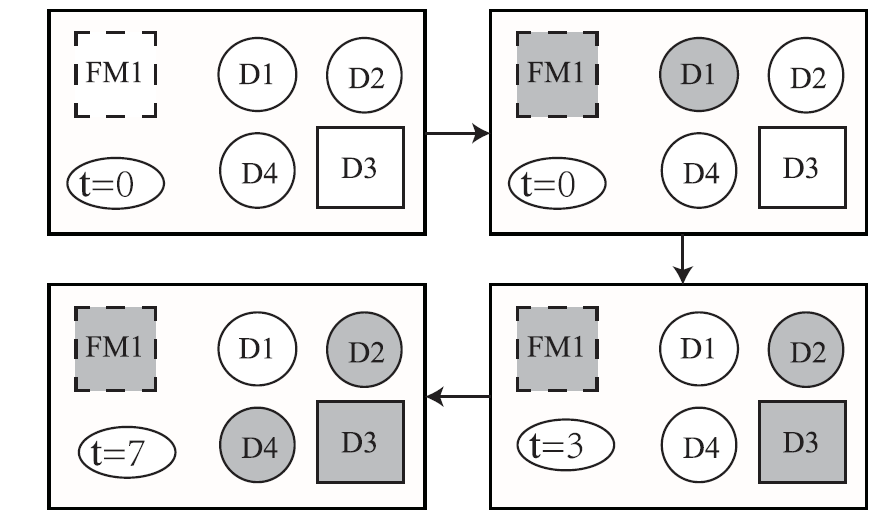
This study examines the issue of interpretability in fault diagnosis for rolling bearings using a symbolic learning technique. We propose the adoption of weighted signal temporal logic (wSTL) as a formal language and introduce the temporal logic network (TLN) as a neural-symbolic learning architecture capable of encoding symbolic wSTL representations for input signals. TLN comprises three subnetworks: a basic predicate network for abstracting features and generating predicates from vibration signals, an autoencoder for identifying significant signal components, and a logic network for constructing a formal language that aids in fault classification and model interpretation. To improve comprehensibility, timed failure propagation graphs (TFPGs) are used to visually represent the logical relationships and propagation of fault events. Experimental results demonstrate TLN’s ability to extract impulse fault patterns from signals, accurately describe fault events through learned wSTL formulas, and enhance understanding of fault events for nonexpert individuals through TFPGs. These findings contribute to the field of fault diagnosis in rolling bearings by incorporating symbolic learning techniques, using formal language representation and TFPG for improved interpretability.
@article{tian2024neural,
title={A Neural-symbolic Network for Interpretable Fault Diagnosis of Rolling Element Bearings Based on Temporal Logic},
author={Tian, Ruoyao and Cui, Mengqian and Chen, Gang},
journal={IEEE Transactions on Instrumentation and Measurement},
year={2024},
publisher={IEEE}
}
|
|
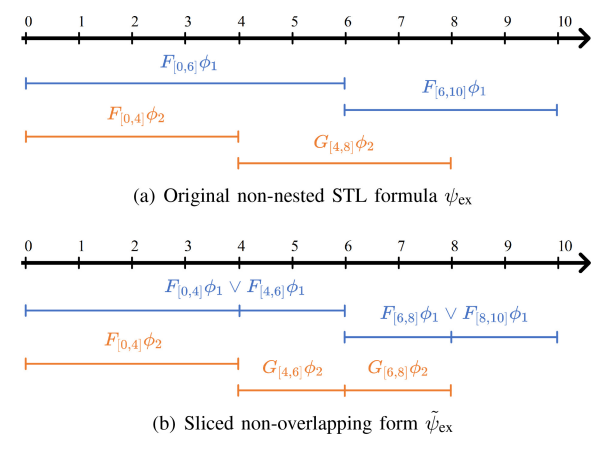
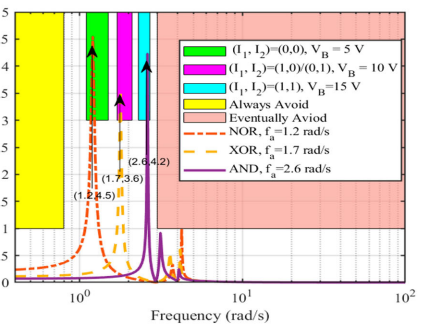
Control/physical systems co-design with spectral temporal logic specifications and its applications to MEMS
Gang Chen, Zhaodan Kong, Longhan Xie
International Journal of Control,2024
PDF
Abstract
BibTeX
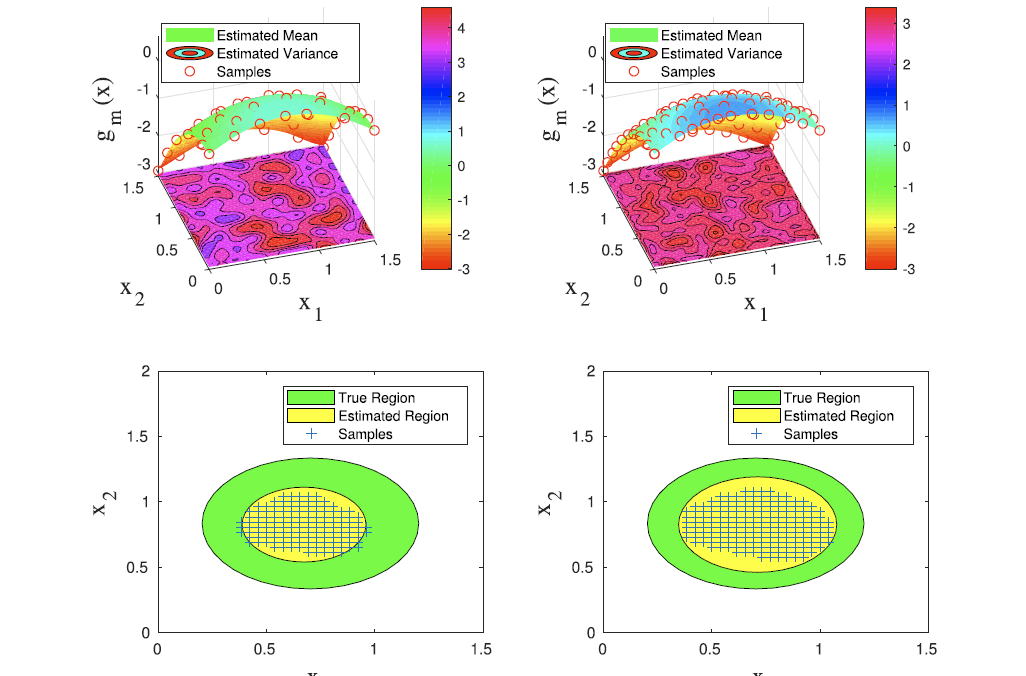
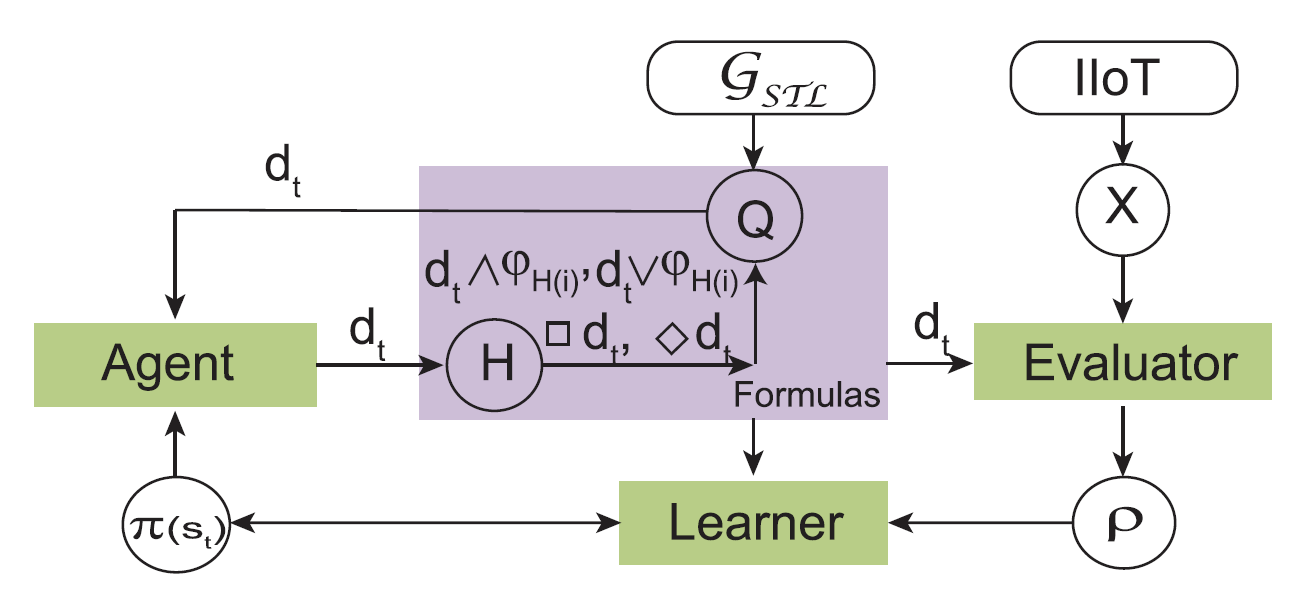
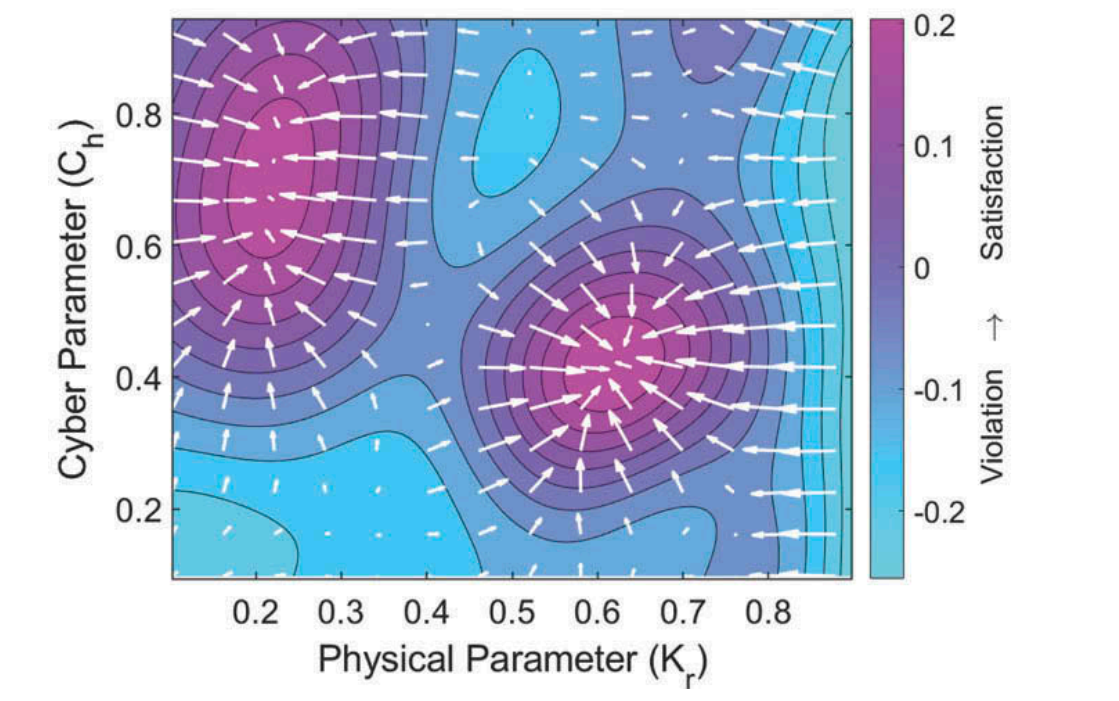
‘Co-design’ problems try to simultaneously design the physical and control components to improve the overall system performance. However, existing co-design paradigms cannot deal with complex frequency temporal domain specifications. In this paper, we investigate the co-design problem for a class of linear parameter-varying (LPV) systems with frequency temporal domain specifications. Firstly, the frequency temporal domain specifications are written in a formal language called spectral temporal logic (STL). Secondly, the satisfaction conditions of the spectral temporal logic specifications have been transformed into non-linear matrices inequality forms with necessary and sufficient conditions. Thirdly, the co-design problem is transformed into a non-convex optimisation problem with mixed-integer linear matrix inequalities (MILMIs) constraints, and then an iterative algorithm is proposed to solve the co-design problem with semidefinite programming (SDP). Finally, the performance of the algorithm and the expressiveness of spectral temporal logic are illustrated with the applications to micro-electromechanical systems (MEMS).
@article{chen2024control,
title={Control/physical systems co-design with spectral temporal logic specifications and its applications to MEMS},
author={Chen, Gang and Kong, Zhaodan and Xie, Longhan},
journal={International Journal of Control},
pages={1--16},
year={2024},
publisher={Taylor \& Francis}
}
|