
Three integrated research programs
Neuro‑Symbolic Foundation Models
Multimodal industrial pretraining with STL‑regularized objectives and causal priors for machine‑checkable rationales and controller‑aware outputs.
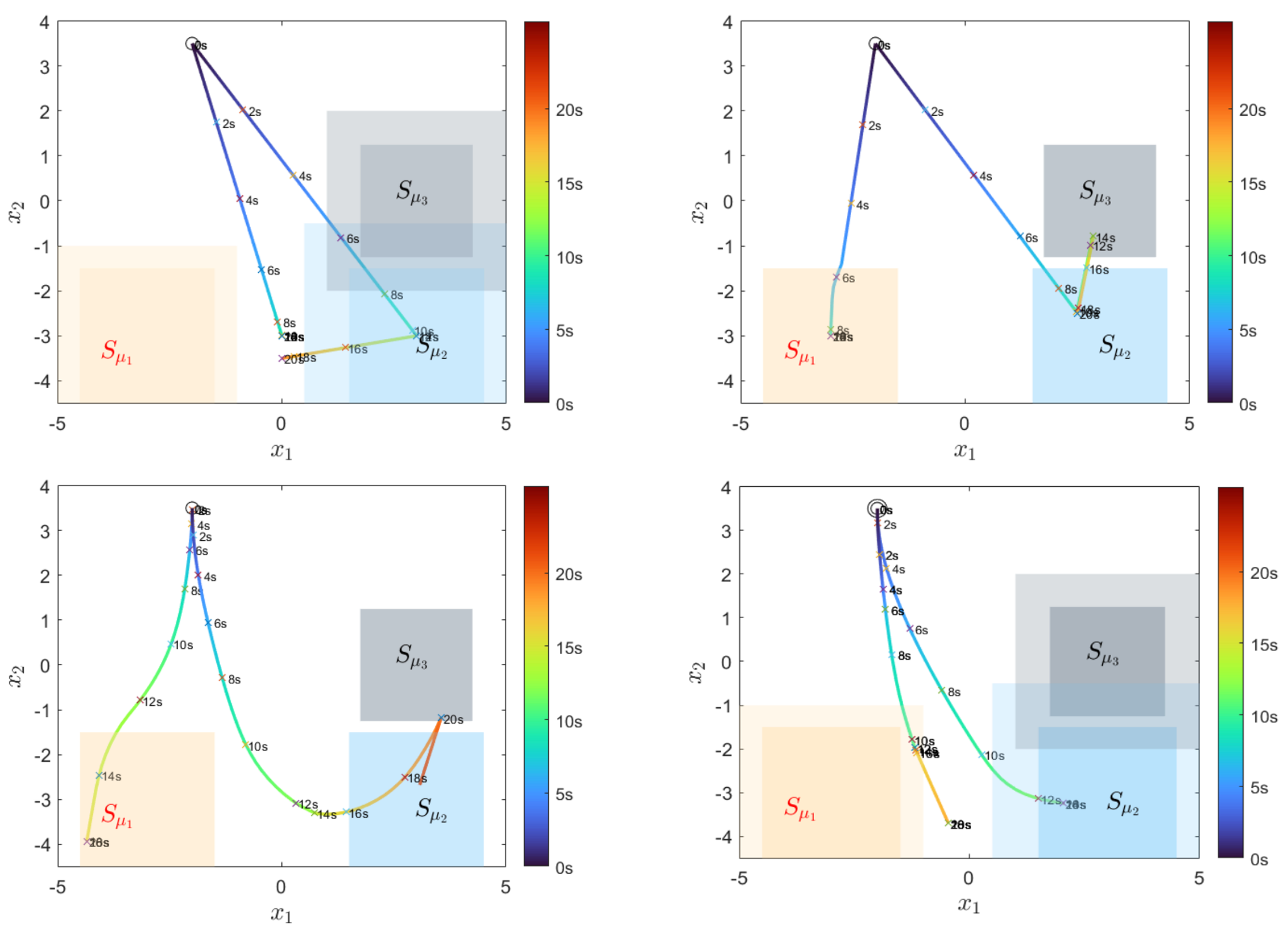
STL‑Driven Safe Autonomy
Plans and controllers synthesized under temporal‑logic contracts. Reference governors guarantee safety; residual RL optimizes within verified tubes.
Causal‑Logic PHM
Physics‑guided features + causal graphs + STL abstractions to reconstruct propagation chains and recommend cost‑aware interventions across fleets.
Integrated module hub
Interpretable Fault Diagnosis
Logic-grounded diagnosis for rotating machinery, industrial equipment, and cyber-physical assets with human-readable evidence and certified root-cause reasoning.
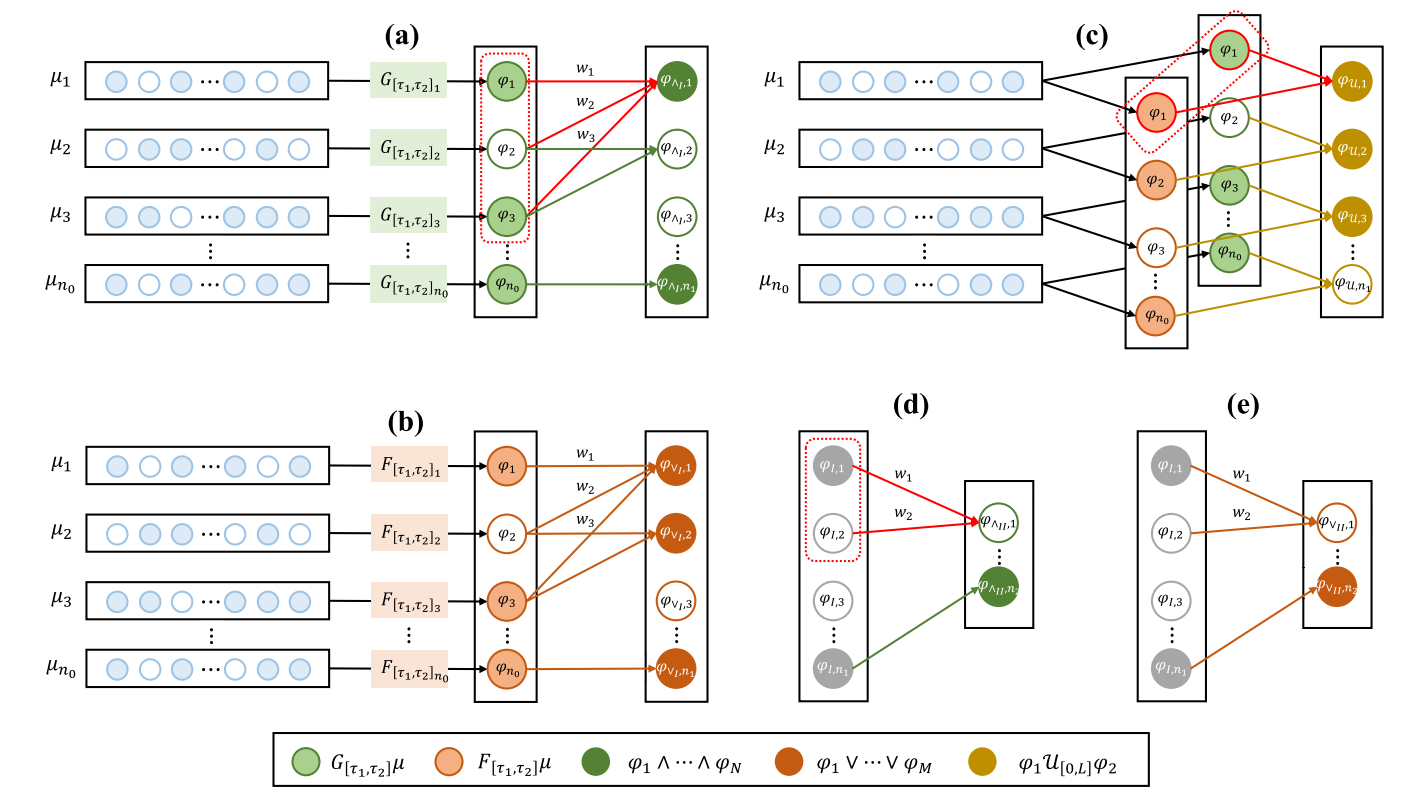
Control Synthesis with Temporal Logic
Safe-by-construction control that compiles temporal specifications into actionable feedback policies, reference governors, and optimization-based supervisors.
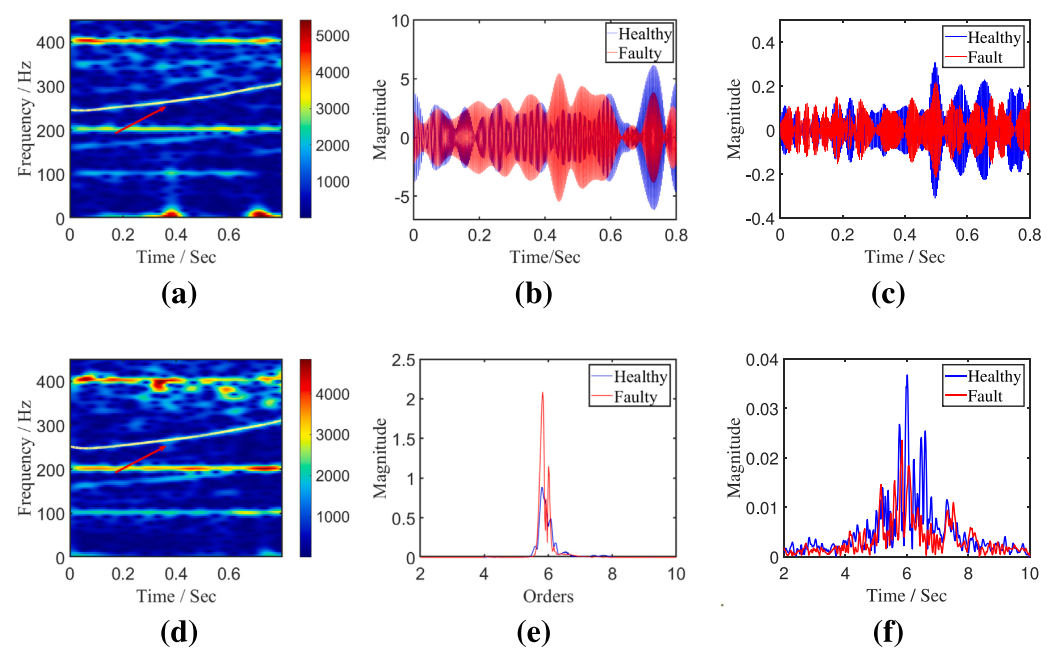
Intelligent Signal Processing
Advanced signal analytics for condition monitoring, feature discovery, and robust perception across noisy, nonstationary industrial environments.
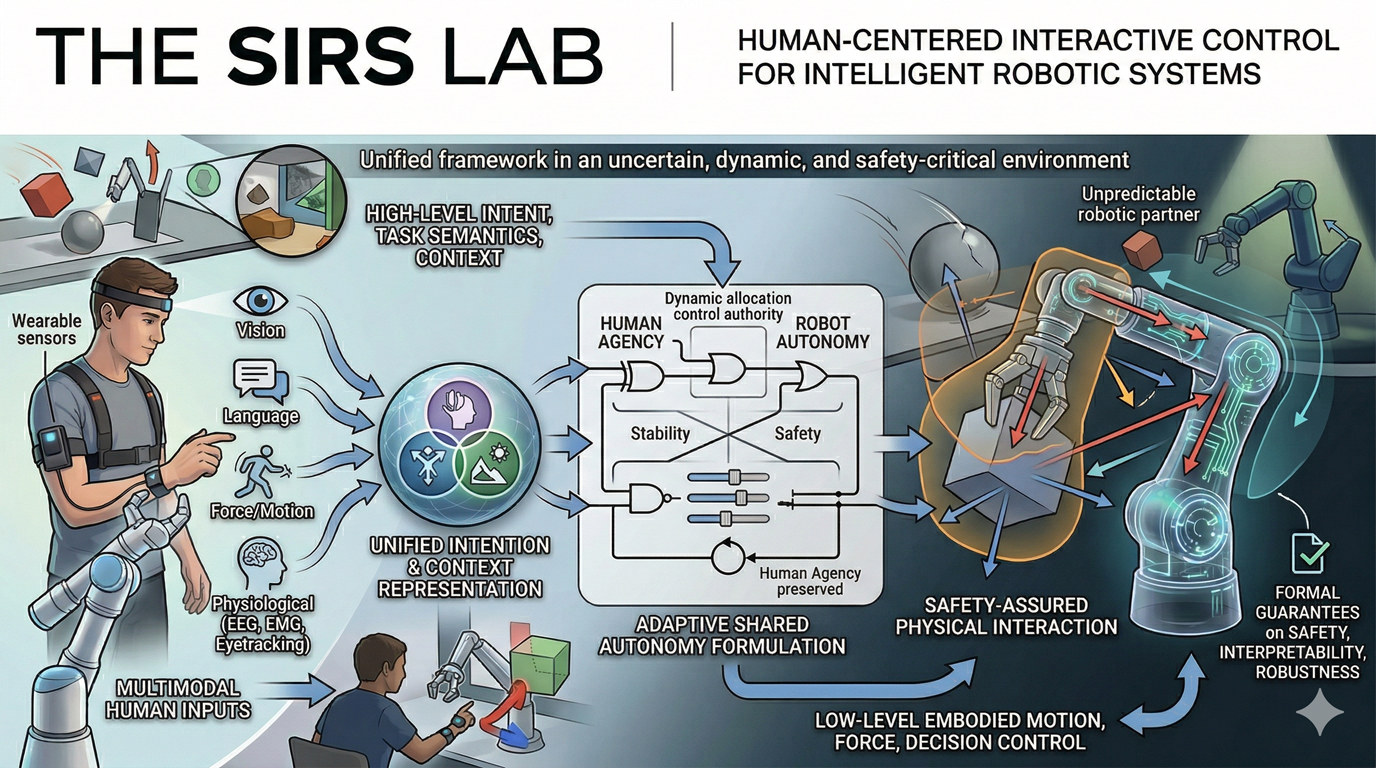
Human-centered Interactive Control
interpretable and verifiable human–robot interaction control theory and methods that integrate multimodal intention understanding, shared autonomy, and safe interactive control for human–robot collaboration in dynamic and uncertain environments.
Intelligent Decision and Planning
Planning, scheduling, and decision support for intelligent manufacturing and robotic systems under uncertainty, constraints, and multi-agent interaction.
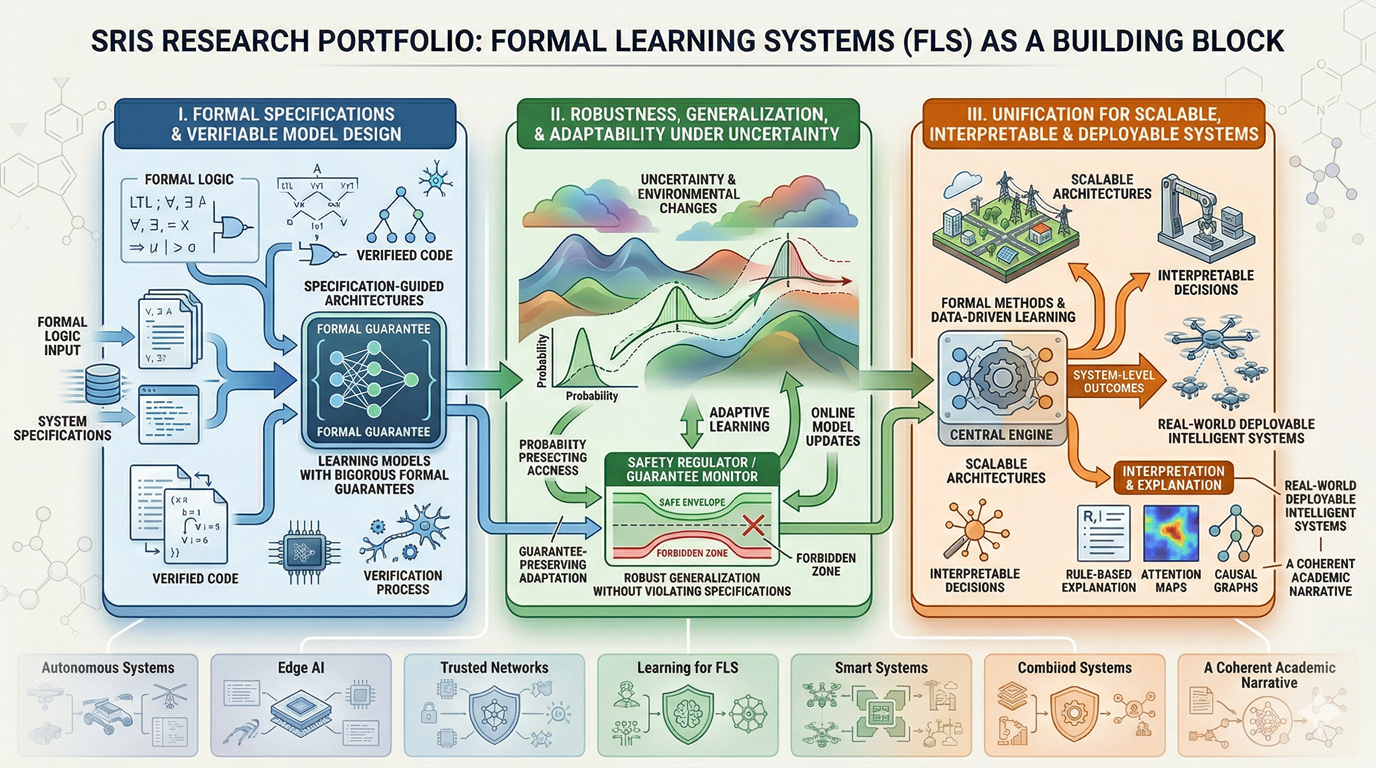
Formal Learning Systems
Neuro-symbolic and formally constrained learning systems that combine data, logic, and physical priors for trustworthy perception, diagnosis, and control.