-
 Academic Community
Academic CommunityGraduation and Lab Culture
A vibrant research environment at South China University of Technology, connecting people, ideas, and interdisciplinary collaboration.
-
 Methodology
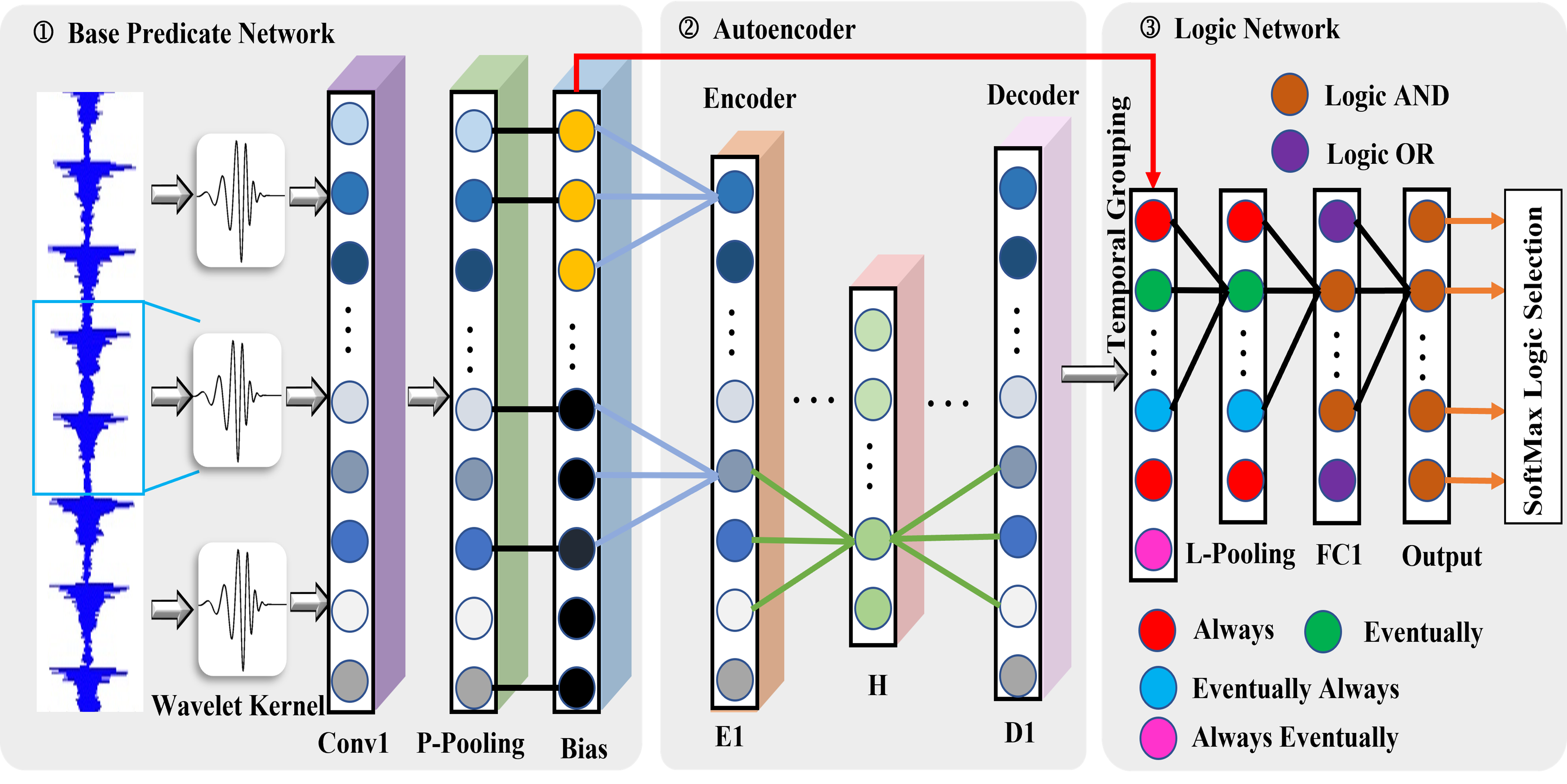
MethodologyNeuro-Symbolic Foundations
Multimodal representation learning guided by temporal logic, causal structure, and machine-verifiable semantics.
-
 Autonomy
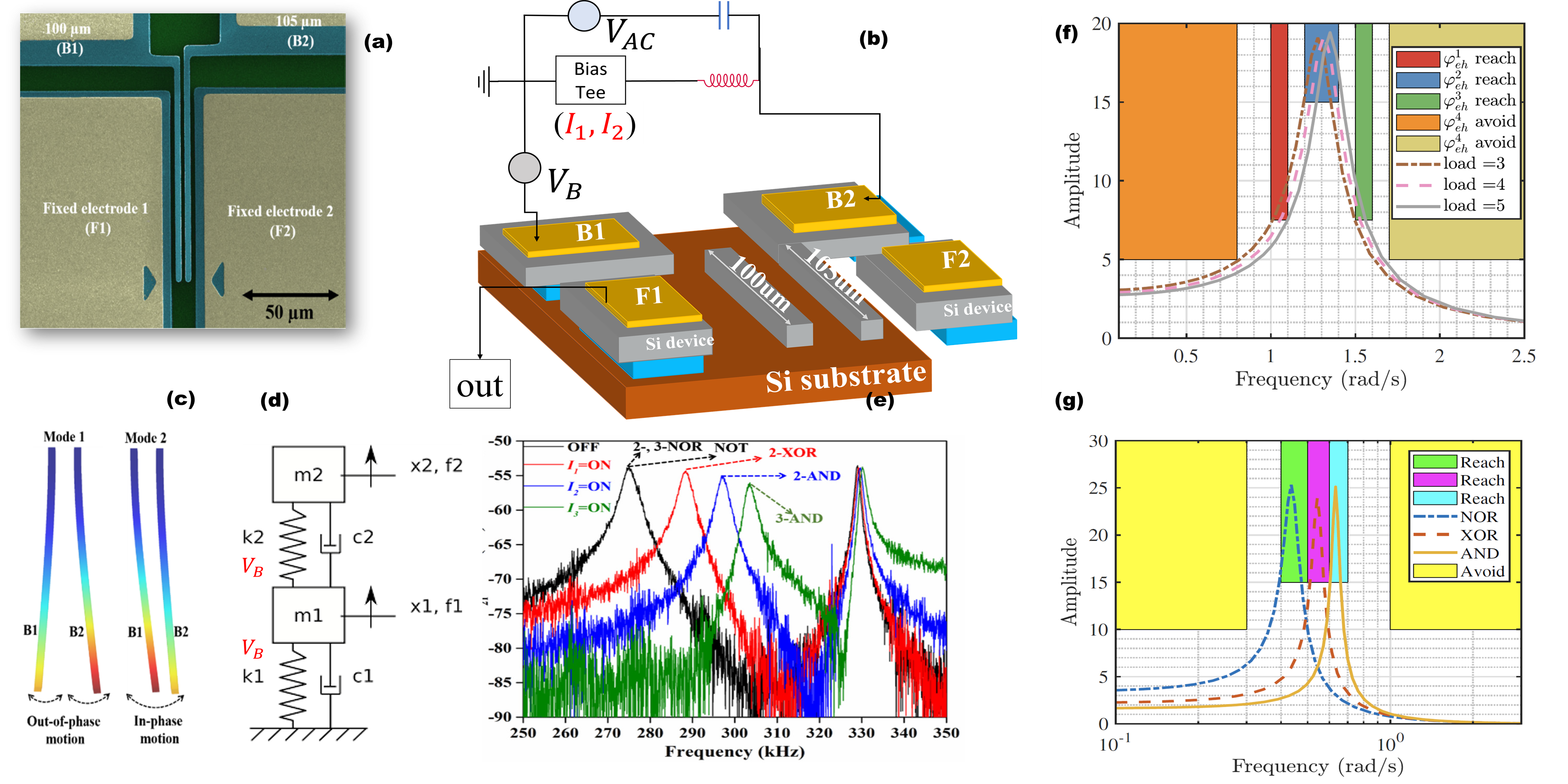
AutonomySTL-Driven Safe Autonomy
Planning and control synthesized under temporal-logic contracts for safe and efficient embodied intelligence.
Trustworthy AI for Intelligent Systems
Designing Smart, Reliable, and Interpretable Systems.
SRIS Lab integrates logic, physics, and learning to build trustworthy intelligent systems for advanced manufacturing, safety-critical autonomy, and health-aware infrastructure.
Our methodology unifies Signal Temporal Logic, causal inference, and physics-guided priors to support interpretable diagnosis, verifiable machine learning, safe autonomy, and fleet-level prognostics.
Neuro-symbolic AI
Physics-guided diagnosis
Safe robot autonomy
SRIS Laboratory
SCUT · GZIC

Logic + Learning
Interpretable and certifiable AI pipelines
PHM + Control
Diagnosis, prediction, and decision-making
Robotics
Safe autonomy and human-centered systems
Critical Systems
Manufacturing and infrastructure applications
South China University of Technology · Guangzhou International Campus