
三大综合研究计划
Neuro‑Symbolic Foundation Models
面向工业多模态预训练,结合STL正则目标与因果先验,生成可机检依据与面向控制器的输出。
STL驱动的安全自主
在时序逻辑契约下综合规划与控制器。参考调节器保证安全,残差强化学习在已验证管道内优化性能。
因果逻辑PHM
融合物理引导特征、因果图与STL抽象,重构传播链并为群体系统推荐成本感知干预。
Integrated module hub
Interpretable Fault Diagnosis
Logic-grounded diagnosis for rotating machinery, industrial equipment, and cyber-physical assets with human-readable evidence and certified root-cause reasoning.
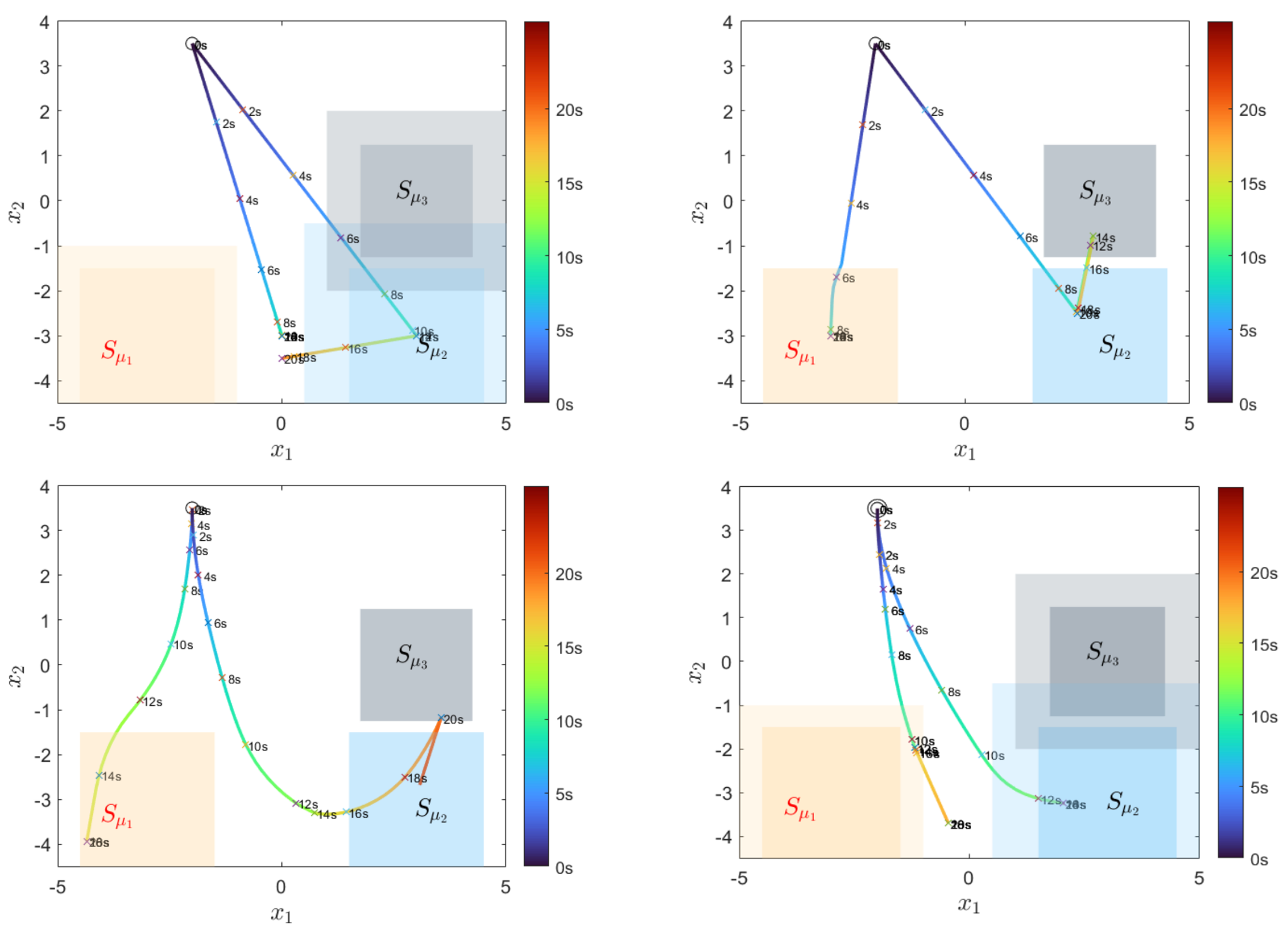
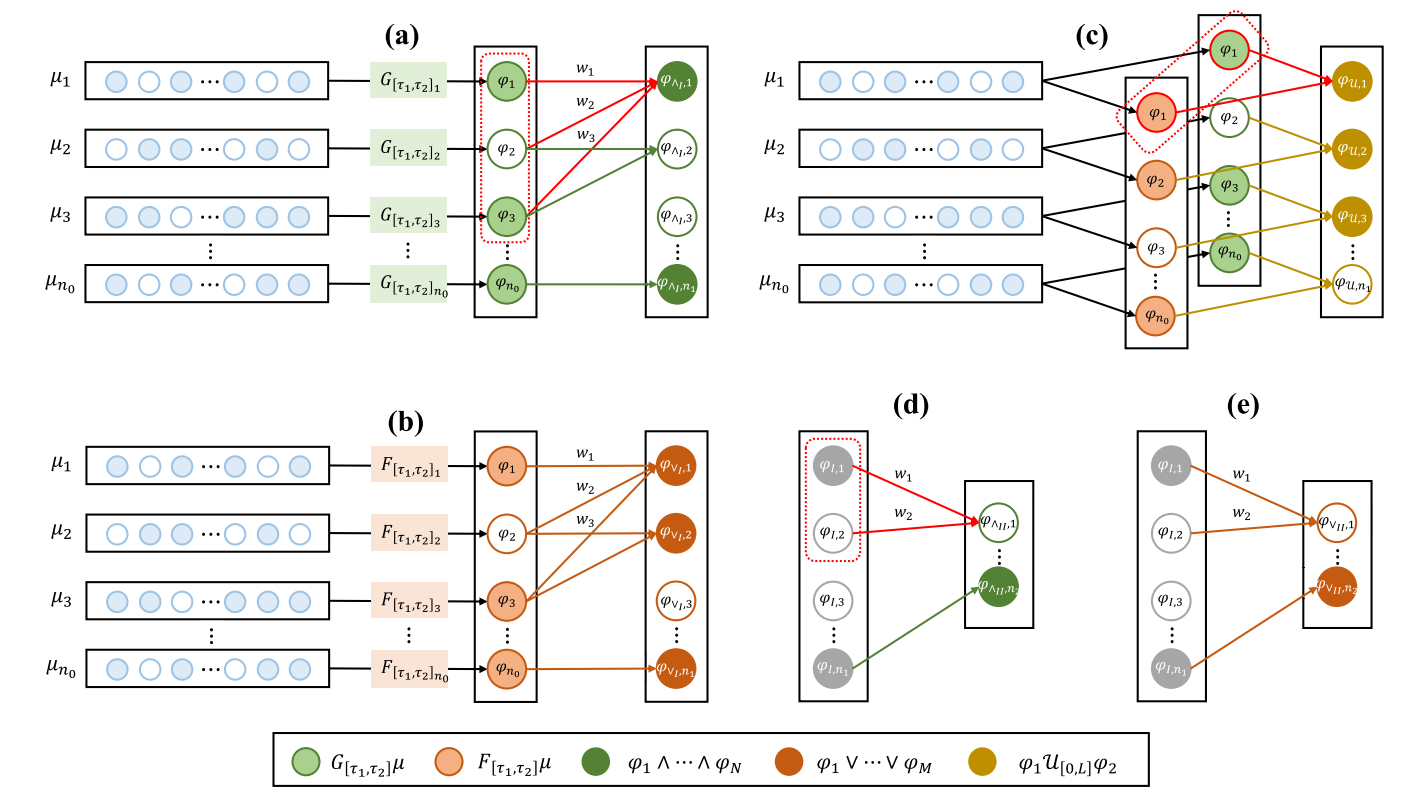
Control Synthesis with Temporal Logic
Safe-by-construction control that compiles temporal specifications into actionable feedback policies, reference governors, and optimization-based supervisors.
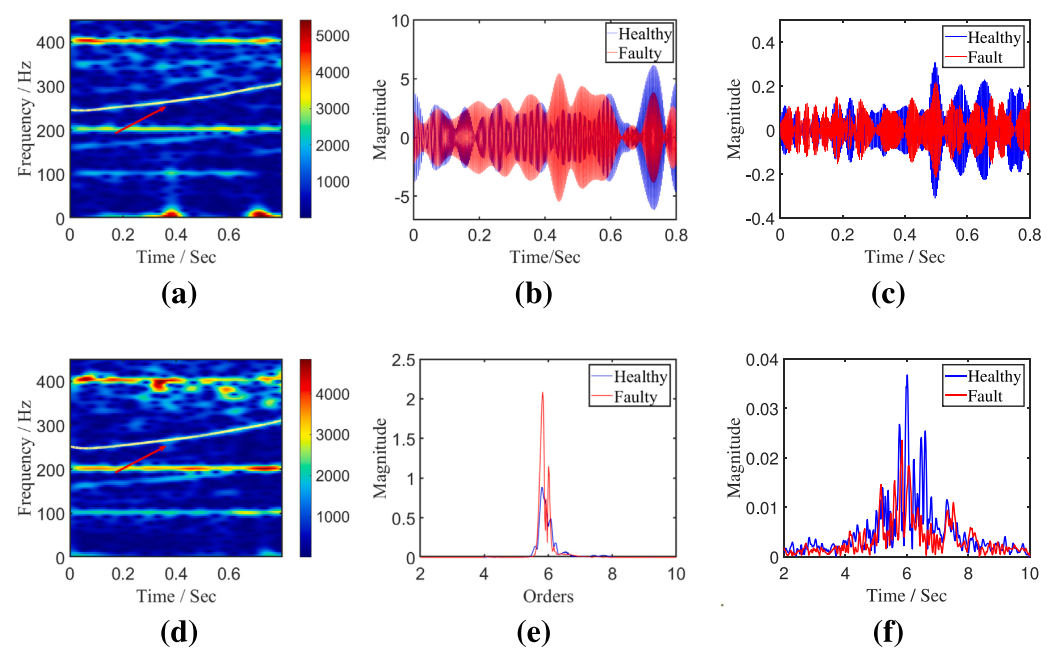
Intelligent Signal Processing
Advanced signal analytics for condition monitoring, feature discovery, and robust perception across noisy, nonstationary industrial environments.
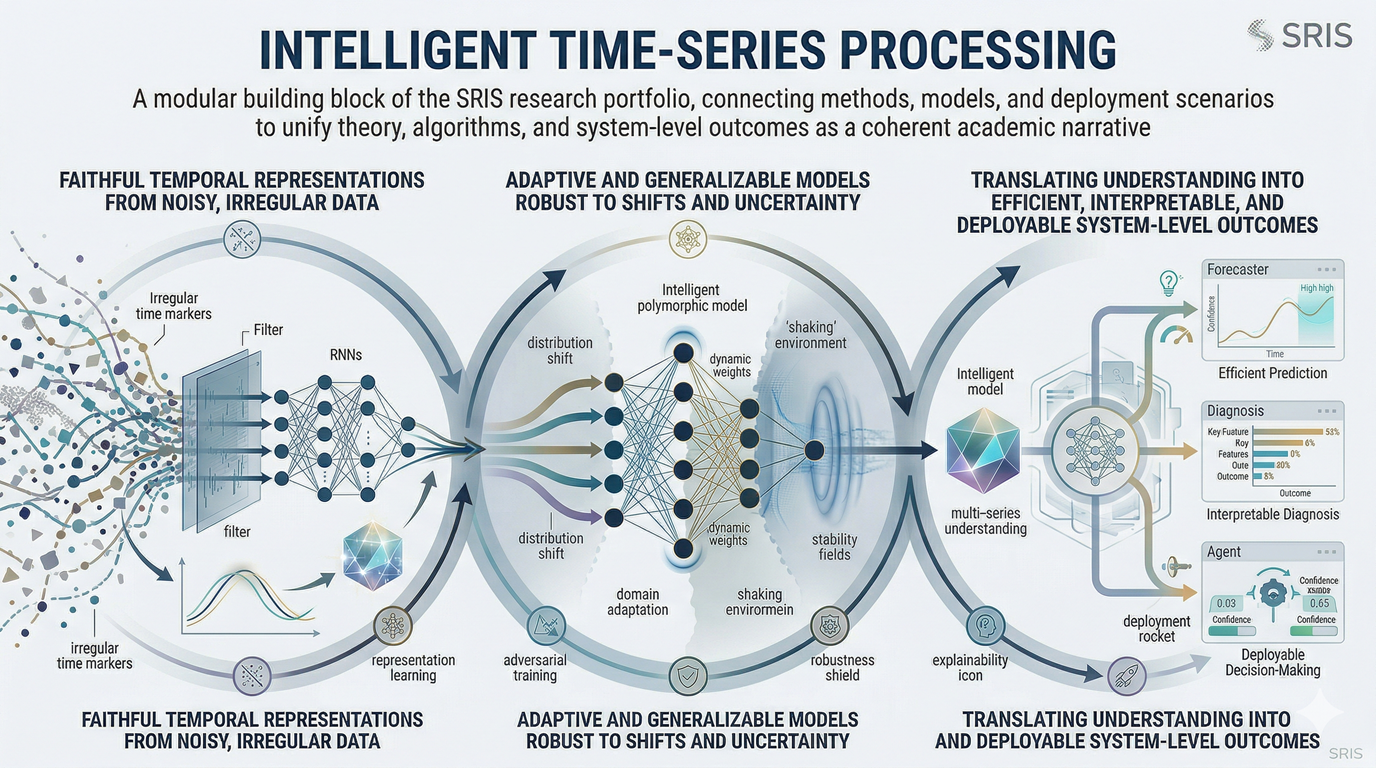
Intelligent Time-Series Processing
Scalable processing of long-horizon industrial time series, combining efficient computation, sequence structure mining, and interpretable representations.
Intelligent Decision and Planning
Planning, scheduling, and decision support for intelligent manufacturing and robotic systems under uncertainty, constraints, and multi-agent interaction.
Formal Learning Systems
Neuro-symbolic and formally constrained learning systems that combine data, logic, and physical priors for trustworthy perception, diagnosis, and control.